En la actualidad, el sector educativo busca desarrollar en los estudiantes competencias en programación, debido a que con ellas los estudiantes logran comprender la estructura, la lógica y el lenguaje de programación empleados por diferentes artefactos o sistemas tecnológicos que funcionan en nuestro entorno (Alvis et al., 2019; Avella et al., 2017). Además, adquirir dichas competencias abre el horizonte a nuevas profesiones requeridas por el mundo globalizado (Barrera et al., 2020; Vargas et al., 2020). Por ello, las instituciones educativas han optado por la aplicación de la robótica educativa, ya que es una herramienta útil para impulsar el aprendizaje y la creatividad de los estudiantes en temas relacionados con la tecnología y conceptos abstractos (Martínez & Niño, 2017).
El área de Tecnología e Informática ha sido establecida por el Ministerio de Educación Nacional como el espacio en donde los estudiantes adquieren las competencias y conocimientos sobre el principio de funcionamiento de los diferentes artefactos, su uso y sus aplicaciones en el contexto (Niño et al., 2016). El uso de tecnologías de bajo costo ha permitido que varias instituciones educativas accedan a ellas, para que los estudiantes logren aplicar los conocimientos adquiridos por medio de la experimentación (Bernate et al., 2020).
Una de las tecnologías de mayor impacto en el sector educativo, así como para aficionados por la ingeniería, es la plataforma Arduino, ya que, al tener gran disponibilidad de componentes de hardware y contar con un software de código abierto, permite mayor accesibilidad para la adquisición o fabricación de materiales, códigos y librerías (Sepúlveda et al., 2019).
De igual forma, dicha plataforma cuenta con la ayuda de softwares de simulación como TinkerCad, un programa muy dinámico y atractivo para el trabajo en computador. La plataforma es una herramienta de simulación que sirve como apoyo al docente, ya que permite llevar al ambiente educativo situaciones que de otro modo serían impensables (Espino et al., 2020).
Por otra parte, los materiales educativos son una mediación entre el objeto de conocimiento y las estrategias cognitivas que emplean los docentes. Estos materiales facilitan la expresión de los estilos de aprendizaje, al crear lazos entre las diferentes disciplinas. Sobre todo, liberan en los estudiantes la creatividad, la capacidad de observar, de descubrir o de complementar un conocimiento (Niño & Fernández, 2019; Niño, Fernández & Duarte 2019).
Con lo expuesto, en este trabajo se plantea el desarrollo de un robot desmontable tipo sumo como prototipo didáctico que pueda ser empleado dentro de un ambiente educativo académico, con el cual los estudiantes podrán aplicar los conceptos de programación y de electrónica básica en Arduino. La finalidad de construir el robot sumo es generar un material didáctico, llamativo y operable, con el cual los estudiantes pongan en práctica el conocimiento que teóricamente adquieren y aumenten la motivación por el aprendizaje de conceptos del área de tecnología, mientras desarrollan competencias en nuevas áreas. A continuación, se presentan el diseño del prototipo y los detalles de fabricación y de la puesta a punto.
Materiales y métodos
Diseño
Se pretende usar el robot desmontable tipo sumo como material educativo de apoyo para el proceso de enseñanza-aprendizaje. Por lo tanto, la interacción directa de los estudiantes con el prototipo logrará su motivación y un aprendizaje más tangible en relación con los conceptos de programación y de electrónica básica. Este prototipo tendrá un movimiento en los diferentes sentidos de giro de sus motores. Además, puede detectar contraste de colores negros y blancos en la superficie donde se mueva, detectar obstáculos que estén frente a él y hacer un movimiento de sus extremidades hacia arriba y hacia abajo. Estas configuraciones serán programadas por los estudiantes. Asi mismo, podrán controlarlo por medio de Bluetooth desde el celular.
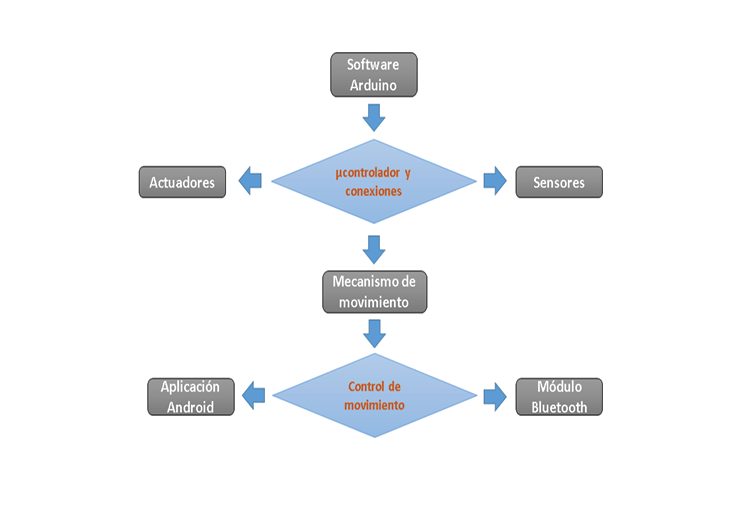
El funcionamiento del robot se programará con la interfaz de desarrollo de Arduino, para lograr las diferentes configuraciones como lo son: seguidor de línea, esquiva objetos y control remoto por medio del celular. La decisión de usar dicha plataforma se debe a que los componentes ―sensores, motores y demás elementos de hardware― son asequibles por su precio y por su disponibilidad en el mercado. Igualmente, trabajar con Arduino garantiza el uso de un software libre y la ventaja de tener un entorno de programación intuitiva, adaptable y adecuada para varios niveles educativos (Niño et al., 2017). En la figura 1, se muestra la estructura propuesta por medio de bloques del robot tipo sumo.
En la figura 1, se puede observar que en el primer bloque se tiene el software Arduino, el cual permitirá un enlace entre la programación desarrollada por el estudiante y el hardware con el que se dará funcionalidad al robot. Dicho hardware está en el segundo bloque, en donde serán el microcontrolador interno de la placa Arduino y las conexiones existentes las que tendrán unos sensores y actuadores que ofrecerán las diferentes configuraciones del robot.
Luego, está el tercer bloque, referente al mecanismo de movimiento, con el que el prototipo podrá moverse en las diferentes direcciones. Para ello, se decidió emplear un mecanismo de dos ruedas seguidoras y una rueda dentada motriz, para dar mayor estabilidad y mostrar a los estudiantes la aplicación de la física mecánica en otras instancias.
Finalmente, en el bloque de control de movimiento, se puede ver el desprendimiento del módulo Bluetooth y la aplicación Android que deberán ser programadas por los estudiantes para lograr un enlace entre el usuario y el prototipo.
Figura 1
Diagrama de bloques propuesto para el prototipo
Metodología
Esta investigación es exploratoria, debido a que se analizará el impacto del prototipo dentro de un ambiente educativo académico para, de esta manera, dar paso a posteriores investigaciones en torno al desarrollo y resultados de este proyecto. El prototipo didáctico está dirigido a estudiantes de educación media en instituciones educativas académicas.
Para el desarrollo del prototipo didáctico, se siguieron las siguientes etapas:
- Determinación de los requerimientos técnicos y pedagógicos para establecer el modelo adecuado del prototipo.
- Diseño de las piezas y mecanismo del robot a través de softwares de modelado en 3D CAD.
- Construcción del prototipo en donde se imprimen las piezas en 3D y se ensamblan para poner a punto el producto.
- Elaboración de las guías de aprendizaje que se pueden implementar con el prototipo didáctico desarrollado.
Para la primera etapa del desarrollo del proyecto, se determinó una estructura mecánica del prototipo, de tal forma que tuviese estabilidad y un tamaño adecuado para colocar los elementos electrónicos en la parte interna. Al ser un robot tipo sumo, se pueden orientar los conocimientos de programación: definición de pines ―digitales y analógicos―, estructuras de control ―if, else if, y for― y comunicación Bluetooth con App Inventor 2. De igual forma, se decidió que fuera desmontable para que el estudiante tuviera una interacción más directa con el prototipo y logre aplicar los conocimientos de programación y los conceptos de electrónica básica.
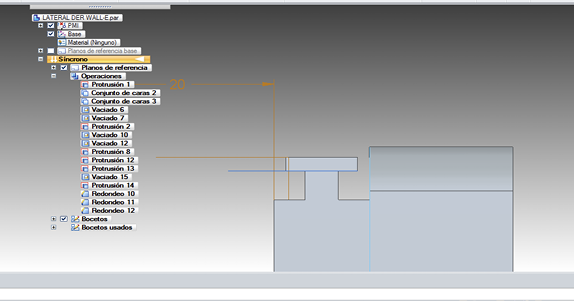
En la segunda etapa, se realizó el diseño estructural del prototipo con los softwares de diseño asistido por computador AutoCad y SolidEdge, programas que permitieron dimensionar adecuadamente el prototipo y todas sus partes. Además, con el software SolidEdge, se hizo la simulación del ensamble de las diferentes piezas, lo que permitió verificar un correcto encaje del método de ensamble utilizado.
En cuanto a la construcción del prototipo, se utilizó fabricación por deposición de material para hacer las piezas. Dicha fabricación aditiva parte de un archivo digital ―modelado 3D―. Se utilizaron diferentes procesos aditivos en los que se aplican capas sucesivas de materia para crear un objeto tangible (Jorquera, 2016) con ácido poliláctico, que es un material de origen biológico (Raquez et al., 2013).
Para dar movimiento al prototipo, se usaron dos motorreductores de 1kg.cm -100 RPM a 12 V y un módulo L298N para el control de velocidad y giro de los motores. Se consiguió una oruga de 45 mm de ancho por 90 cm de largo, la cual se dividió en dos para disponerla en ambos costados del robot, que serán el equivalente de las ruedas de un carro. De igual manera, el movimiento de los brazos se dará con la ayuda de servomotores de referencia MG996R con engranaje metálico, que ofrece un torque de 9,4 kgf.cm a 4,8 V. Además, se usaron sensores ópticos infrarrojos reflectantes TCRT5000 para la configuración del robot como sigue líneas y el sensor de ultrasonido HC-SR04 para configurarlo como esquiva objetos.
Resultados
Debido a la decisión de elaborar un prototipo desmontable, se puede observar en la figura 2 el tipo de mecanismo usado para el encaje de las piezas. Este es de tipo macho hembra en T. Tal mecanismo se empleó con el fin de obtener una mayor estabilidad y resistencia al momento de armar las piezas.
Figura 2
Mecanismo de encaje para las piezas
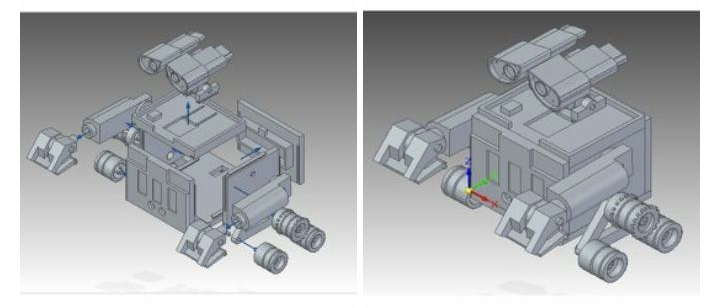
Para llamar la atención de los estudiantes por medio del robot, se escogió un diseño atractivo. Por lo tanto, se decidió tomar la forma de un personaje de película ―Wall•E― para el diseño del prototipo. En la figura 3, se ilustra la simulación del ensamble de las piezas que conforman el robot, así como el mecanismo que ofrecerá el movimiento, sin contar la oruga plástica que será movida por las ruedas del robot.
Figura 3
Explosionado y ensamble simulado de las piezas que componen el robot sumo
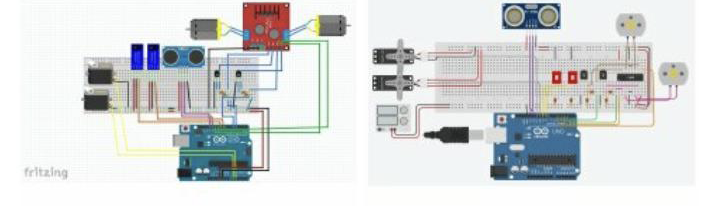
Para obtener el diseño electrónico más adecuado, en primera instancia se usó el software de diseño Fritzing, ya que permite a los usuarios una interacción más fácil entre componentes electrónicos y la realización de un boceto funcional (Ping & Chein, 2015). Por lo tanto, se usó para realizar la disposición apropiada de cada componente electrónico, tal y como se muestra en la figura 4. Luego, con los elementos disponibles en el software en línea TinkerCad, se hizo la simulación del circuito.
Figura 4
Diseño electrónico en software Fritzing y TinkerCad
Para el proceso de fabricación del prototipo didáctico, se realizó la impresión en 3D de las piezas. En este proceso, cada impresora tomó un tiempo promedio de siete horas por conjunto de piezas que se puedan adecuar. Una vez concluidas, se alistaron completamente al quitar soportes hechos por la impresora y pulir partes rugosas. En la figura 5, se pueden observar muestras tomadas en el ensamble de algunas piezas alistadas y la disposición de los elementos electrónicos dentro de dichas piezas.
Figura 5
Proceso de ensamble del robot

Al disponer de todas las piezas del prototipo y de los elementos electrónicos necesarios, se ensambló para verificar el encaje de las piezas y el libre movimiento de partes mecánicas tal y como se muestra en la figura 6. Con ello se obtuvo un prototipo listo para ser puesto a punto.
Con el robot ensamblado se han realizado varias pruebas para verificar el correcto funcionamiento de cada uno de los elementos que lo componen. En la figura 7, se puede observar la programación usada para comprobar el funcionamiento de los sensores ópticos infrarrojos y el sensor de ultrasonido, los cuales activarán los dos motores que le dan movimiento al robot.
Figura 6
Robot sumo ensamblado
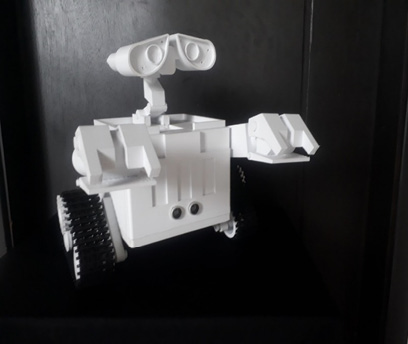
Figura 7
Códigos para pruebas de robot sigue líneas y esquiva objetos.
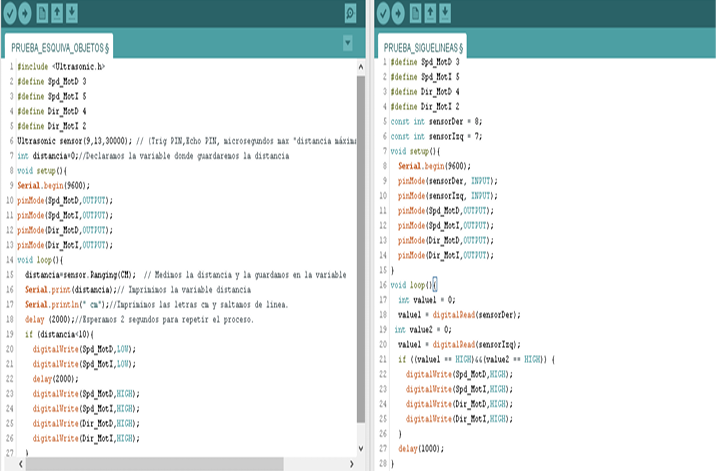
La programación ubicada a la izquierda de la figura 7 permite una prueba básica del robot esquiva objetos con el sensor de ultrasonido HC-SR04, para lo cual se debe usar una librería llamada Ultrasonic.h, con la que podemos utilizar el sensor y medir una distancia máxima de 5 m. Sin embargo, al ser usado en un robot esquiva objetos, se dejó un umbral de distancia de 10 cm. Cuando detecte dicha distancia, se detendrá y esperará 2 segundos para luego intentar avanzar nuevamente. Por otra parte, el código de la parte derecha de la figura 7 permite hacer las pruebas correspondientes a un robot sigue líneas. Cuando los sensores detecten el color blanco, el robot avanzará hacia adelante.
Discusión
Como resultado del proceso de desarrollo del robot, se obtuvo un prototipo con piezas desmontables, portátil, atractivo y de fácil uso, para ser implementado en el aprendizaje de conceptos de programación en Arduino. Además, el prototipo se complementa con el acompañamiento de guías de aprendizaje para su ensamblaje, conexión electrónica y programación, con el fin de que los estudiantes puedan interactuar al usar conceptos básicos, para luego experimentar y usar la creatividad al momento de programar. Dichas guías de laboratorio se caracterizan por ser flexibles, ya que no estipulan un orden específico para las actividades y permiten que el estudiante empiece a desarrollar desde el punto que desee, además de proporcionar fuentes o recursos de consultas (Cristancho & Niño, 2020; López et al., 2018).
La implementación del prototipo en el aula está orientada a un ambiente educativo de tipo académico rural, con el apoyo de herramientas mediadas por tecnologías de la información y la comunicación, con el fin de que los estudiantes puedan acceder a información complementaria y formar foros de debates y de resolución colaborativa de problemas.
Este prototipo didáctico, además de permitir un acercamiento con los robots seguidores de líneas y esquiva objetos, también permitirá al estudiante adquirir competencias para manejar servomotores y la comunicación Bluetooth entre la placa Arduino y un celular Android. Del mismo modo, podrán modificar el robot con algunos conocimientos básicos en modelado 3D o incluso replicarlo completamente.
Los resultados de este estudio se suman a investigaciones en donde se establece la importancia de diseñar y construir materiales educativos, idóneos para la enseñanza-aprendizaje de conceptos, siempre y cuando estos sean pensados en las necesidades de quienes aprenden (Hernández & Jaramillo, 2020; Niño et al., 2017; Padilla et al., 2020). De igual forma, en este estudio se puede corroborar que, aunque en el mercado existe variedad de artefactos tecnológicos óptimos para la enseñanza de conceptos de programación, es interesante desarrollar prototipos multipropósitos con los cuales se pueda enseñar de todo a todos y sean de bajo costo (Niño, Fernández & Duarte, 2019; Orozco et al., 2020; Pérez et al., 2020).
Con respecto al diseño del prototipo, es de resaltar que este se tuvo en cuenta para captar la atención del estudiante y, de esta manera, despertar la curiosidad para que él lo aprendiera a manipular. Estudios realizados alrededor del desarrollo de prototipos didácticos manifiestan que la clave del éxito para que el material didáctico tenga impacto positivo en la escuela es si este cuenta con una morfología y un diseño llamativo e interesante, ya que el ser humano tiende a cuestionarse sobre el funcionamiento del artefacto y, por medio de la experimentación y del aprendizaje vicario, logra aprender (Niño et al., 2020; Suárez et al., 2020; Torres & Niño, 2020).
Finalmente, en este estudio, a pesar de que el robot sumo tiene un diseño llamativo, contiene varios módulos con equipamiento electrónico y adaptable a la tarjeta inteligente Arduino y cuenta con las guías didácticas necesarias para el montaje mecánico y electrónico ―necesarias para su funcionamiento―, se puede decir que el éxito en el proceso de enseñanza-aprendizaje de conceptos de programación radica en la estrategia pedagógica que el docente emplee para ponerlo en práctica en el aula de clases.
Conclusiones
Con la revisión técnica y pedagógica del prototipo didáctico, se pudo realizar un diseño y una construcción adecuados para implementarlo de manera creativa y eficaz en la enseñanza y aprendizaje de conceptos de programación en Arduino. Del mismo modo, al ser una herramienta didáctica que motiva la implementación de nuevas tecnologías, las instituciones educativas pueden replicarlo fácilmente y con una inversión mínima, lo cual les permitiría adentrarse en el conocimiento de tecnologías que motivan al estudiante al aprendizaje.
Con el prototipo didáctico desarrollado, se estructuraron diez guías de aprendizaje dirigidas a estudiantes de educación media de una institución académica. En estas guías los estudiantes aprenderán sobre: los principios básicos de electrónica y el hardware de Arduino, el ensamble por piezas del robot, la elaboración de los circuitos y la respectiva programación para la construcción de un robot sigue líneas y esquiva objetos y el manejo de servomotores para el control de los brazos.
Como trabajo futuro, se espera validar el robot desarrollado con la población objeto de estudio y programar una página web, con la cual se pretende hospedar toda la información sobre el presente proyecto, con el fin de que demás docentes del área puedan implementarlo en sus instituciones educativas.
Referencias
Alvis, J., Aldana, E., & Caicedo, S. (2019). Los ambientes de aprendizaje reales como estrategia pedagógica para el desarrollo de competencias matemáticas en estudiantes de básica secundaria. Revista de Investigación, Desarrollo e Innovación, 10(1), 135-147. https://doi.org/10.19053/20278306.v10.n1.2019.10018
Avella, C., Sandoval, E., & Montañez, C. (2017). Selección de herramientas web para la creación de actividades de aprendizaje en Cibermutua. Revista de Investigación, Desarrollo e Innovación, 8(1), 107-120. https://doi.org/10.19053/20278306.v8.n1.2017.7372
Barrera, C., Niño, J., & Fernández, F. (2020). Desarrollo de competencias digitales en programación de aplicaciones móviles en estudiantes de noveno grado a través de tres estrategias pedagógicas. Revista Boletín Redipe, 9(4), 179-191.
Bernate, J., García, M., Fonseca, I., & Ramírez, N. (2020). Prácticas de enseñanza y evaluación en una facultad de educación colombiana. Revista de Investigación, Desarrollo e Innovación, 10(2), 337-347. https://doi.org/10.19053/20278306.v10.n2.2020.10721
Cristancho, M., & Niño, J. (2020). Estrategia de formación docente para la intervención en casos de ciberbullying. Infometric@ - Serie Sociales y Humanas, 3(1), 109-130. http://infometrica.org/index.php/ssh/article/view/110
Espino, P., Olaguez, E., Gámez, J., Said, A., Davizón, Y., & Hernández, C. (2020). Uso de simuladores computacionales y prototipos experimentales orientados al aprendizaje de circuitos eléctricos en alumnos de educación básica. DYNA New Technologics, 7(1), 14.
Hernández, C., & Jaramillo, F. (2020). Laboratorio de innovación social: hibridación creativa entre las necesidades sociales y las experiencias significativas de los estudiantes de administración de empresas. Revista de Investigación, Desarrollo e Innovación, 10(2), 267-281. https://doi.org/10.19053/20278306.v10.n2.2020.10518
Jorquera, A. (2016). Fabricación digital: introducción al modelado e impresión 3D. Ministerio de Educación, Cultura y Deporte.
López, M., Morán, R., & Niño, J. (2018). Prácticas experimentales como estrategia didáctica para la comprensión de conceptos de física mecánica en estudiantes de educación superior. Infometric@ - Serie Ingeniería, Básicas y Agrícolas, 1(1), 1-14. http://infometrica.org/index.php/syh/article/view/12
Martínez, L., & Niño, J. (2017). Elaboración de una mano robótica didáctica para la enseñanza de programación en Arduino, dirigida al nivel de educación media en una institución educativa de la ciudad de Duitama [Tesis de pregrado, Universidad Pedagógica y Tecnológica de Colombia]. Repositorio de la Universidad Pedagógica y Tecnológica de Colombia. https://repositorio.uptc.edu.co/handle/001/2257
Niño, J., & Fernández, F. (2019). Una mirada a la enseñanza de conceptos científicos y tecnológicos a través del material didáctico utilizado. Revista Espacios, 40(15), 4. http://www.revistaespacios.com/a19v40n15/19401504.html
Niño, J., Ducuara, L., & Fernández, F. (2020). Validación de una estrategia didáctica gamificada para la enseñanza-aprendizaje de conceptos de ecología. Revista Espacios, 41(46), 30-40. https://www.revistaespacios.com/a20v41n46/20414604.html
Niño, J., Fernández, F., & Duarte, J. (2019). Diseño de un recurso educativo digital para fomentar el uso racional de la energía eléctrica en comunidades rurales. Saber, Ciencia y Libertad, 14(2), 256-272. https://doi.org/10.18041/2382-3240/saber.2019v14n2.5889
Niño, J., Martínez, L., & Fernández, F. (2016). Mano robótica como alternativa para la enseñanza de conceptos de programación en Arduino. Revista Colombiana de Tecnologías de Avanzada, 2(28), 132-139. https://doi.org/10.24054/16927257.v28.n28.2016.2476
Niño, J., Martínez, L., Fernández, F., Duarte, J., Reyes, F., & Gutiérrez, G. (2017). Entorno de aprendizaje para la enseñanza de programación en Arduino mediado por una mano robótica didáctica. Revista Espacios, 38(60), 23. http://www.revistaespacios.com/a17v38n60/17386023.html
Orozco, M., Niño, J., & Fernández, F. (2020). Estrategia pedagógica para formar a padres y acudientes sobre el fenómeno del ciberacoso. Revista Espacios, 41(33), 24-33. https://www.revistaespacios.com/a20v41n33/20413303.html
Padilla, A., Medina, J., & Ospina, J. (2020). Métodos de aprendizaje automático en los estudios prospectivos desde un ejemplo de la financiación de la innovación en Colombia. Revista de Investigación, Desarrollo e Innovación, 11(1), 9-21. https://doi.org/10.19053/20278306.v11.n1.2020.11676
Pérez, G., Niño, J., & Fernández, F. (2020). Estrategia pedagógica basada en simuladores para potenciar las competencias de solución de problemas de física. Aibi, Revista de Investigación, Administración e Ingeniería, 8(3), 17-23. https://doi.org/10.15649/2346030X.863
Ping, L., & Chein, L. (2015). Aplicación de software de código abierto Fritzing y Arduino al diseño de cursos de sistemas integrados. Revista Internacional de Ingeniería de Control y Automatización, 4(1), 40-44.
Raquez, J., Habibi, Y., Murariu, M., & Dubois, P. (2013). Polylactide (PLA)-based nanocomposites. Progress in Polymer Science, 38(10-11), 1504-1542.
Sepúlveda, S., Castro, J., Medina, B., Guevara, D., & López, O. (2019). Sistema de geolocalización de vehículos a través de la red GSM/GPRS y tecnología Arduino. Revista EIA, 16(31), 145-157. https://doi.org/10.24050/reia.v16i31.1269
Suárez, Y., Rincón, R., & Niño, J. (2020). Aplicación de herramientas web 3.0 para el desarrollo de competencias investigativas en estudiantes de educación media. Pensamiento y Acción, (29), 3-20. https://revistas.uptc.edu.co/index.php/pensamiento_accion/article/view/11069
Torres, Y., & Niño, J. (2020). Estrategia didáctica mediada por memes para el fortalecimiento de la lectura crítica. Revista Boletín Redipe, 9(10), 62-74. https://doi.org/10.36260/rbr.v9i10.1088
Vargas, N., Niño, J., & Fernández, F. (2020). Aprendizaje basado en proyectos mediados por TIC para superar dificultades en el aprendizaje de operaciones básicas matemáticas. Revista Boletín Redipe, 9(3), 167-180. https://doi.org/10.36260/rbr.v9i3.943